Ipopt::CompositeNLP Class Reference
This class creates a composite NLP from a list of NLP's. More...
#include <CompositeNLP.hpp>
Public Member Functions | |
Constructors/Destructors | |
| CompositeNLP (std::vector< SmartPtr< NLP > > nlps, SmartPtr< VectorSpace > q_space, std::vector< SmartPtr< VectorSpace > > linking_eqn_c_spaces, std::vector< SmartPtr< Matrix > > Jx_linking_eqns, std::vector< SmartPtr< Matrix > > Jq_linking_eqns) | |
| Default constructor. | |
| virtual | ~CompositeNLP () |
| Default destructor. | |
Exceptions | |
| DECLARE_STD_EXCEPTION (INVALID_JACOBIAN_DIMENSION_FOR_LINKING_EQUATIONS) | |
CompositeNLP Initialization. | |
| virtual bool | ProcessOptions (const OptionsList &options, const std::string &prefix) |
| Method for creating the derived vector / matrix types (Do not delete these, the ). | |
| virtual bool | GetSpaces (SmartPtr< const VectorSpace > &x_space, SmartPtr< const VectorSpace > &c_space, SmartPtr< const VectorSpace > &d_space, SmartPtr< const VectorSpace > &x_l_space, SmartPtr< const MatrixSpace > &px_l_space, SmartPtr< const VectorSpace > &x_u_space, SmartPtr< const MatrixSpace > &px_u_space, SmartPtr< const VectorSpace > &d_l_space, SmartPtr< const MatrixSpace > &pd_l_space, SmartPtr< const VectorSpace > &d_u_space, SmartPtr< const MatrixSpace > &pd_u_space, SmartPtr< const MatrixSpace > &Jac_c_space, SmartPtr< const MatrixSpace > &Jac_d_space, SmartPtr< const SymMatrixSpace > &Hess_lagrangian_space) |
| Method for creating the derived vector / matrix types (Do not delete these, the ). | |
| virtual bool | GetBoundsInformation (const Matrix &Px_L, Vector &x_L, const Matrix &Px_U, Vector &x_U, const Matrix &Pd_L, Vector &d_L, const Matrix &Pd_U, Vector &d_U) |
| Method for obtaining the bounds information. | |
| virtual bool | GetStartingPoint (SmartPtr< Vector > x, bool need_x, SmartPtr< Vector > y_c, bool need_y_c, SmartPtr< Vector > y_d, bool need_y_d, SmartPtr< Vector > z_L, bool need_z_L, SmartPtr< Vector > z_U, bool need_z_U) |
| Method for obtaining the starting point for all the iterates. | |
CompositeNLP evaluation routines. | |
| virtual bool | Eval_f (const Vector &x, Number &f) |
| virtual bool | Eval_grad_f (const Vector &x, Vector &g_f) |
| virtual bool | Eval_c (const Vector &x, Vector &c) |
| virtual bool | Eval_jac_c (const Vector &x, Matrix &jac_c) |
| virtual bool | Eval_d (const Vector &x, Vector &d) |
| virtual bool | Eval_jac_d (const Vector &x, Matrix &jac_d) |
| virtual bool | Eval_h (const Vector &x, Number obj_factor, const Vector &yc, const Vector &yd, SymMatrix &h) |
Information about the Composite Structure | |
| SmartPtr< SymLinearSolver > | CreateLinearSolver () |
| returns an appropriate linear solver for the problem structure | |
Private Member Functions | |
Default Compiler Generated Methods | |
| CompositeNLP () | |
| Default Constructor. | |
| CompositeNLP (const CompositeNLP &) | |
| Copy Constructor. | |
| void | operator= (const CompositeNLP &) |
| Overloaded Equals Operator. | |
Private Attributes | |
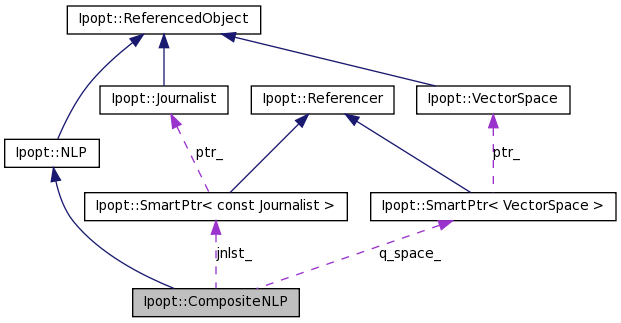
| SmartPtr< const Journalist > | jnlst_ |
| Journalist. | |
| std::vector< SmartPtr< NLP > > | nlps_ |
| std::vector of nlps | |
| SmartPtr< VectorSpace > | q_space_ |
| vector space for the linking variables, q | |
| std::vector< SmartPtr < VectorSpace > > | linking_eqn_c_spaces_ |
| std::vector of VectorSpaces for the linking equations | |
Data about Linking Equations. For now, | |
| std::vector< SmartPtr< Matrix > > | Jx_linking_eqns_ |
| std::vector of Jacobian of the linking eqns (one for each nlp) with respect to x variables | |
| std::vector< SmartPtr< Matrix > > | Jq_linking_eqns_ |
| std::vector of Jacobian of the linking eqns (one for each nlp) with respect to linking variables (q) | |
Detailed Description
This class creates a composite NLP from a list of NLP's.
This is a Composite class (Design Patterns) that creates a single NLP from a list of NLP's with some common variables. This allows users to "link" different NLP's into a single NLP easily
Definition at line 25 of file CompositeNLP.hpp.
Constructor & Destructor Documentation
| Ipopt::CompositeNLP::CompositeNLP | ( | std::vector< SmartPtr< NLP > > | nlps, | |
| SmartPtr< VectorSpace > | q_space, | |||
| std::vector< SmartPtr< VectorSpace > > | linking_eqn_c_spaces, | |||
| std::vector< SmartPtr< Matrix > > | Jx_linking_eqns, | |||
| std::vector< SmartPtr< Matrix > > | Jq_linking_eqns | |||
| ) |
Default constructor.
| virtual Ipopt::CompositeNLP::~CompositeNLP | ( | ) | [virtual] |
Default destructor.
| Ipopt::CompositeNLP::CompositeNLP | ( | ) | [private] |
Default Constructor.
| Ipopt::CompositeNLP::CompositeNLP | ( | const CompositeNLP & | ) | [private] |
Copy Constructor.
Member Function Documentation
| Ipopt::CompositeNLP::DECLARE_STD_EXCEPTION | ( | INVALID_JACOBIAN_DIMENSION_FOR_LINKING_EQUATIONS | ) |
| virtual bool Ipopt::CompositeNLP::ProcessOptions | ( | const OptionsList & | options, | |
| const std::string & | prefix | |||
| ) | [virtual] |
Method for creating the derived vector / matrix types (Do not delete these, the ).
Reimplemented from Ipopt::NLP.
| virtual bool Ipopt::CompositeNLP::GetSpaces | ( | SmartPtr< const VectorSpace > & | x_space, | |
| SmartPtr< const VectorSpace > & | c_space, | |||
| SmartPtr< const VectorSpace > & | d_space, | |||
| SmartPtr< const VectorSpace > & | x_l_space, | |||
| SmartPtr< const MatrixSpace > & | px_l_space, | |||
| SmartPtr< const VectorSpace > & | x_u_space, | |||
| SmartPtr< const MatrixSpace > & | px_u_space, | |||
| SmartPtr< const VectorSpace > & | d_l_space, | |||
| SmartPtr< const MatrixSpace > & | pd_l_space, | |||
| SmartPtr< const VectorSpace > & | d_u_space, | |||
| SmartPtr< const MatrixSpace > & | pd_u_space, | |||
| SmartPtr< const MatrixSpace > & | Jac_c_space, | |||
| SmartPtr< const MatrixSpace > & | Jac_d_space, | |||
| SmartPtr< const SymMatrixSpace > & | Hess_lagrangian_space | |||
| ) | [virtual] |
Method for creating the derived vector / matrix types (Do not delete these, the ).
Implements Ipopt::NLP.
| virtual bool Ipopt::CompositeNLP::GetBoundsInformation | ( | const Matrix & | Px_L, | |
| Vector & | x_L, | |||
| const Matrix & | Px_U, | |||
| Vector & | x_U, | |||
| const Matrix & | Pd_L, | |||
| Vector & | d_L, | |||
| const Matrix & | Pd_U, | |||
| Vector & | d_U | |||
| ) | [virtual] |
Method for obtaining the bounds information.
Implements Ipopt::NLP.
| virtual bool Ipopt::CompositeNLP::GetStartingPoint | ( | SmartPtr< Vector > | x, | |
| bool | need_x, | |||
| SmartPtr< Vector > | y_c, | |||
| bool | need_y_c, | |||
| SmartPtr< Vector > | y_d, | |||
| bool | need_y_d, | |||
| SmartPtr< Vector > | z_L, | |||
| bool | need_z_L, | |||
| SmartPtr< Vector > | z_U, | |||
| bool | need_z_U | |||
| ) | [virtual] |
Method for obtaining the starting point for all the iterates.
Implements Ipopt::NLP.
Implements Ipopt::NLP.
Implements Ipopt::NLP.
Implements Ipopt::NLP.
Implements Ipopt::NLP.
Implements Ipopt::NLP.
Implements Ipopt::NLP.
| virtual bool Ipopt::CompositeNLP::Eval_h | ( | const Vector & | x, | |
| Number | obj_factor, | |||
| const Vector & | yc, | |||
| const Vector & | yd, | |||
| SymMatrix & | h | |||
| ) | [virtual] |
Implements Ipopt::NLP.
| SmartPtr<SymLinearSolver> Ipopt::CompositeNLP::CreateLinearSolver | ( | ) |
returns an appropriate linear solver for the problem structure
| void Ipopt::CompositeNLP::operator= | ( | const CompositeNLP & | ) | [private] |
Overloaded Equals Operator.
Reimplemented from Ipopt::NLP.
Member Data Documentation
SmartPtr<const Journalist> Ipopt::CompositeNLP::jnlst_ [private] |
Definition at line 139 of file CompositeNLP.hpp.
std::vector<SmartPtr<NLP> > Ipopt::CompositeNLP::nlps_ [private] |
std::vector of nlps
Definition at line 142 of file CompositeNLP.hpp.
SmartPtr<VectorSpace> Ipopt::CompositeNLP::q_space_ [private] |
vector space for the linking variables, q
Definition at line 145 of file CompositeNLP.hpp.
std::vector<SmartPtr<VectorSpace> > Ipopt::CompositeNLP::linking_eqn_c_spaces_ [private] |
std::vector of VectorSpaces for the linking equations
Definition at line 148 of file CompositeNLP.hpp.
std::vector<SmartPtr<Matrix> > Ipopt::CompositeNLP::Jx_linking_eqns_ [private] |
std::vector of Jacobian of the linking eqns (one for each nlp) with respect to x variables
Definition at line 157 of file CompositeNLP.hpp.
std::vector<SmartPtr<Matrix> > Ipopt::CompositeNLP::Jq_linking_eqns_ [private] |
std::vector of Jacobian of the linking eqns (one for each nlp) with respect to linking variables (q)
Definition at line 161 of file CompositeNLP.hpp.
The documentation for this class was generated from the following file:
- /home/coin/svn-release/OptimizationSuite-1.1.0/Ipopt/src/Apps/CompositeInterface/CompositeNLP.hpp
