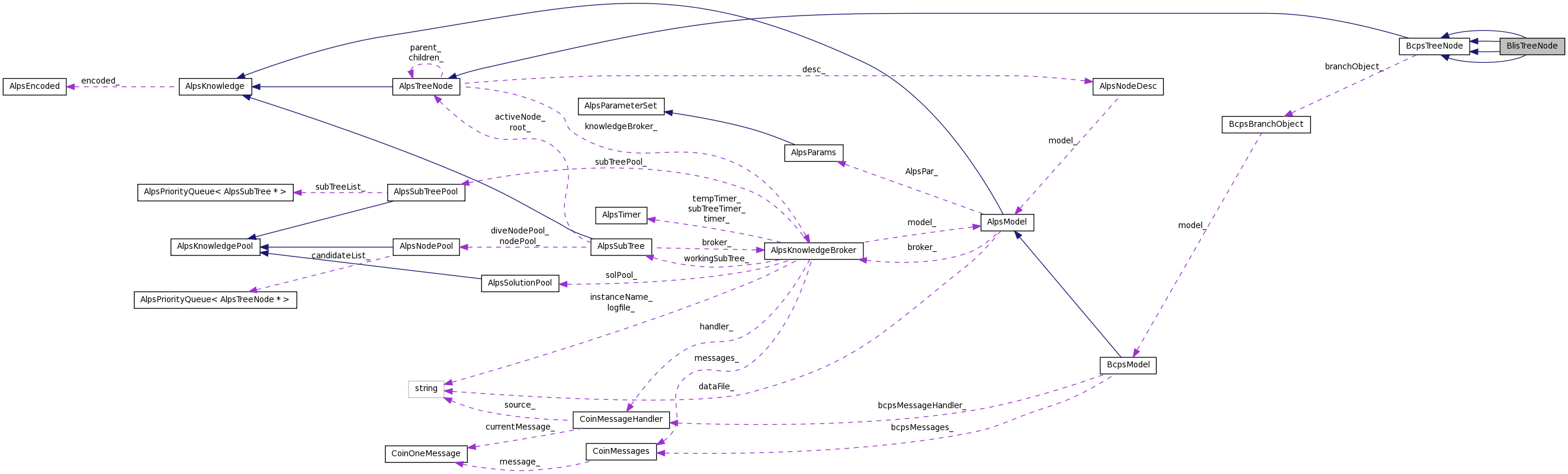
BlisTreeNode Class Reference
This is the class in which we are finally able to concretely define the bounding procedure. More...
#include <BlisSubTree.h>
Public Member Functions | |
| BlisTreeNode () | |
| Default constructor. | |
| BlisTreeNode (BlisModel *m) | |
| Useful constructor. | |
| BlisTreeNode (AlpsNodeDesc *&desc) | |
| Useful constructor. | |
| virtual | ~BlisTreeNode () |
| Destructor. | |
| void | init () |
| Initilize member data when constructing a node. | |
| AlpsTreeNode * | createNewTreeNode (AlpsNodeDesc *&desc) const |
| Create a new node based on given desc. | |
| virtual int | installSubProblem (BcpsModel *mode) |
| intall subproblem | |
| virtual int | process (bool isRoot=false, bool rampUp=false) |
| Performing the bounding operation. | |
| virtual int | bound (BcpsModel *model) |
| Bounding procedure. | |
| virtual std::vector < CoinTriple< AlpsNodeDesc *, AlpsNodeStatus, double > > | branch () |
| Takes the explicit description of the current active node and creates the children's descriptions, which contain information about how the branching is to be done. | |
| int | selectBranchObject (BlisModel *model, bool &foundSol, int numPassesLeft) |
| Select a branching object based on give branching strategy. | |
| virtual int | chooseBranchingObject (BcpsModel *) |
| To be defined. | |
| int | generateConstraints (BlisModel *model, OsiCuts &cutPool) |
| Generate constraints. | |
| int | applyConstraints (BlisModel *model, OsiCuts &cutPool, const double *solution) |
| Select and apply constraints. | |
| int | reducedCostFix (BlisModel *model) |
| Fix and tighten varaibles based optimality conditions. | |
| virtual AlpsEncoded * | encode () const |
| Return constraint pool. | |
| virtual AlpsKnowledge * | decode (AlpsEncoded &) const |
| Decode a node from an encoded object. | |
| BlisTreeNode () | |
| Default constructor. | |
| BlisTreeNode (BlisModel *m) | |
| Useful constructor. | |
| BlisTreeNode (AlpsNodeDesc *&desc) | |
| Useful constructor. | |
| virtual | ~BlisTreeNode () |
| Destructor. | |
| void | init () |
| Initilize member data when constructing a node. | |
| AlpsTreeNode * | createNewTreeNode (AlpsNodeDesc *&desc) const |
| Create a new node based on given desc. | |
| virtual int | installSubProblem (BcpsModel *mode) |
| intall subproblem | |
| virtual int | process (bool isRoot=false, bool rampUp=false) |
| Performing the bounding operation. | |
| virtual int | bound (BcpsModel *model) |
| Bounding procedure. | |
| virtual std::vector < CoinTriple< AlpsNodeDesc *, AlpsNodeStatus, double > > | branch () |
| Takes the explicit description of the current active node and creates the children's descriptions, which contain information about how the branching is to be done. | |
| int | selectBranchObject (BlisModel *model, bool &foundSol, int numPassesLeft) |
| Select a branching object based on give branching strategy. | |
| virtual int | chooseBranchingObject (BcpsModel *) |
| To be defined. | |
| int | generateConstraints (BlisModel *model, BcpsConstraintPool &conPool) |
| Generate constraints. | |
| int | callHeuristics (BlisModel *model, bool onlyBeforeRoot=false) |
| Call heuristic to search solutions. | |
| void | getViolatedConstraints (BlisModel *model, const double *currLpSolution, BcpsConstraintPool &conPool) |
| Get violated constraints. | |
| BlisReturnStatus | applyConstraints (BlisModel *model, const double *solution, BcpsConstraintPool &conPool) |
| Select and apply constraints. | |
| BlisReturnStatus | reducedCostFix (BlisModel *model) |
| Fix and tighten varaibles based optimality conditions. | |
| virtual AlpsEncoded * | encode () const |
| Encode this node for message passing. | |
| virtual AlpsKnowledge * | decode (AlpsEncoded &) const |
| Decode a node from an encoded object. | |
| virtual void | convertToExplicit () |
| Convert explicit description to difference, and vise-vesa. | |
| virtual void | convertToRelative () |
| Convert explicit description to difference, and vise-vesa. | |
| virtual void | convertToExplicit () |
| Convert explicit description to difference, and vise-vesa. | |
| virtual void | convertToRelative () |
| Convert explicit description to difference, and vise-vesa. | |
Private Member Functions | |
| virtual void | process () |
| void | branch (AlpsTreeNode &explicitNode) |
| Takes the explicit description of the current active node and creates the children, adds them to the priority queue, etc. | |
| virtual bool | fathom () |
| Takes the explicit description of the current active node and decides whether or not it should be fathomed. | |
| BlisTreeNode (const BlisTreeNode &) | |
| No copy constructor, assignment operator. | |
| BlisTreeNode & | operator= (const BlisTreeNode &) |
| bool | parallel (BlisModel *model, OsiCuts *newCutSet, int lastNew, OsiRowCut *rowCut) |
| Constraint pool. | |
| virtual void | process () |
| void | branch (AlpsTreeNode &explicitNode) |
| Takes the explicit description of the current active node and creates the children, adds them to the priority queue, etc. | |
| virtual bool | fathom () |
| Takes the explicit description of the current active node and decides whether or not it should be fathomed. | |
| BlisTreeNode (const BlisTreeNode &) | |
| No copy constructor, assignment operator. | |
| BlisTreeNode & | operator= (const BlisTreeNode &) |
| bool | parallel (BlisModel *model, BcpsConstraintPool &conPool, int lastNew, BlisConstraint *aCon) |
| Constraint pool. | |
| double | estimateSolution (BlisModel *model, const double *lpSolution, double lpObjValue) const |
| Estimate quality of a feasible solution. | |
Detailed Description
This is the class in which we are finally able to concretely define the bounding procedure.
Here we can assume that we have an LP solver and that the objects are cuts and variables, etc.
Definition at line 34 of file BlisSubTree.h.
Constructor & Destructor Documentation
| BlisTreeNode::BlisTreeNode | ( | const BlisTreeNode & | ) | [private] |
No copy constructor, assignment operator.
| BlisTreeNode::BlisTreeNode | ( | ) | [inline] |
Default constructor.
Definition at line 75 of file BlisTreeNode.h.
| BlisTreeNode::BlisTreeNode | ( | BlisModel * | m | ) | [inline] |
Useful constructor.
Definition at line 81 of file BlisTreeNode.h.
| BlisTreeNode::BlisTreeNode | ( | AlpsNodeDesc *& | desc | ) | [inline] |
Useful constructor.
Definition at line 87 of file BlisTreeNode.h.
| virtual BlisTreeNode::~BlisTreeNode | ( | ) | [inline, virtual] |
Destructor.
Definition at line 94 of file BlisTreeNode.h.
| BlisTreeNode::BlisTreeNode | ( | const BlisTreeNode & | ) | [private] |
No copy constructor, assignment operator.
| BlisTreeNode::BlisTreeNode | ( | ) | [inline] |
Default constructor.
Definition at line 79 of file BlisTreeNode.h.
| BlisTreeNode::BlisTreeNode | ( | BlisModel * | m | ) | [inline] |
Useful constructor.
Definition at line 85 of file BlisTreeNode.h.
| BlisTreeNode::BlisTreeNode | ( | AlpsNodeDesc *& | desc | ) | [inline] |
Useful constructor.
Definition at line 91 of file BlisTreeNode.h.
| virtual BlisTreeNode::~BlisTreeNode | ( | ) | [inline, virtual] |
Destructor.
Definition at line 98 of file BlisTreeNode.h.
Member Function Documentation
| virtual void BlisTreeNode::process | ( | ) | [private, virtual] |
| void BlisTreeNode::branch | ( | AlpsTreeNode & | explicitNode | ) | [private] |
Takes the explicit description of the current active node and creates the children, adds them to the priority queue, etc.
Most likely, the node description will contain information about how the branching is to be done.
| virtual bool BlisTreeNode::fathom | ( | ) | [private, virtual] |
Takes the explicit description of the current active node and decides whether or not it should be fathomed.
| BlisTreeNode& BlisTreeNode::operator= | ( | const BlisTreeNode & | ) | [private] |
Reimplemented from AlpsTreeNode.
| bool BlisTreeNode::parallel | ( | BlisModel * | model, | |
| OsiCuts * | newCutSet, | |||
| int | lastNew, | |||
| OsiRowCut * | rowCut | |||
| ) | [private] |
Constraint pool.
Variable pool. Save an explicit node description.
| void BlisTreeNode::init | ( | ) | [inline] |
Initilize member data when constructing a node.
Definition at line 100 of file BlisTreeNode.h.
| AlpsTreeNode* BlisTreeNode::createNewTreeNode | ( | AlpsNodeDesc *& | desc | ) | const [virtual] |
Create a new node based on given desc.
Implements AlpsTreeNode.
| virtual void BlisTreeNode::convertToExplicit | ( | ) | [virtual] |
Convert explicit description to difference, and vise-vesa.
Reimplemented from AlpsTreeNode.
| virtual void BlisTreeNode::convertToRelative | ( | ) | [virtual] |
Convert explicit description to difference, and vise-vesa.
Reimplemented from AlpsTreeNode.
| virtual int BlisTreeNode::installSubProblem | ( | BcpsModel * | mode | ) | [virtual] |
intall subproblem
Implements BcpsTreeNode.
| virtual int BlisTreeNode::process | ( | bool | isRoot = false, |
|
| bool | rampUp = false | |||
| ) | [virtual] |
Performing the bounding operation.
Reimplemented from BcpsTreeNode.
| virtual int BlisTreeNode::bound | ( | BcpsModel * | model | ) | [virtual] |
Bounding procedure.
Implements BcpsTreeNode.
| virtual std::vector< CoinTriple<AlpsNodeDesc*, AlpsNodeStatus, double> > BlisTreeNode::branch | ( | ) | [virtual] |
Takes the explicit description of the current active node and creates the children's descriptions, which contain information about how the branching is to be done.
The stati of the children are AlpsNodeStatusCandidate.
Implements BcpsTreeNode.
| int BlisTreeNode::selectBranchObject | ( | BlisModel * | model, | |
| bool & | foundSol, | |||
| int | numPassesLeft | |||
| ) |
Select a branching object based on give branching strategy.
| virtual int BlisTreeNode::chooseBranchingObject | ( | BcpsModel * | ) | [inline, virtual] |
Generate constraints.
| int BlisTreeNode::applyConstraints | ( | BlisModel * | model, | |
| OsiCuts & | cutPool, | |||
| const double * | solution | |||
| ) |
Select and apply constraints.
| int BlisTreeNode::reducedCostFix | ( | BlisModel * | model | ) |
Fix and tighten varaibles based optimality conditions.
| virtual AlpsEncoded* BlisTreeNode::encode | ( | ) | const [virtual] |
Return constraint pool.
Return variable pool. Encode this node for message passing.
Reimplemented from AlpsKnowledge.
| virtual AlpsKnowledge* BlisTreeNode::decode | ( | AlpsEncoded & | ) | const [virtual] |
Decode a node from an encoded object.
Reimplemented from AlpsKnowledge.
| virtual void BlisTreeNode::process | ( | ) | [private, virtual] |
| void BlisTreeNode::branch | ( | AlpsTreeNode & | explicitNode | ) | [private] |
Takes the explicit description of the current active node and creates the children, adds them to the priority queue, etc.
Most likely, the node description will contain information about how the branching is to be done.
| virtual bool BlisTreeNode::fathom | ( | ) | [private, virtual] |
Takes the explicit description of the current active node and decides whether or not it should be fathomed.
| BlisTreeNode& BlisTreeNode::operator= | ( | const BlisTreeNode & | ) | [private] |
Reimplemented from AlpsTreeNode.
| bool BlisTreeNode::parallel | ( | BlisModel * | model, | |
| BcpsConstraintPool & | conPool, | |||
| int | lastNew, | |||
| BlisConstraint * | aCon | |||
| ) | [private] |
Constraint pool.
Variable pool. Save an explicit node description. Check and remove parallel constraints.
| double BlisTreeNode::estimateSolution | ( | BlisModel * | model, | |
| const double * | lpSolution, | |||
| double | lpObjValue | |||
| ) | const [private] |
Estimate quality of a feasible solution.
| void BlisTreeNode::init | ( | ) | [inline] |
Initilize member data when constructing a node.
Definition at line 103 of file BlisTreeNode.h.
| AlpsTreeNode* BlisTreeNode::createNewTreeNode | ( | AlpsNodeDesc *& | desc | ) | const [virtual] |
Create a new node based on given desc.
Implements AlpsTreeNode.
| virtual void BlisTreeNode::convertToExplicit | ( | ) | [virtual] |
Convert explicit description to difference, and vise-vesa.
Reimplemented from AlpsTreeNode.
| virtual void BlisTreeNode::convertToRelative | ( | ) | [virtual] |
Convert explicit description to difference, and vise-vesa.
Reimplemented from AlpsTreeNode.
| virtual int BlisTreeNode::installSubProblem | ( | BcpsModel * | mode | ) | [virtual] |
intall subproblem
Implements BcpsTreeNode.
| virtual int BlisTreeNode::process | ( | bool | isRoot = false, |
|
| bool | rampUp = false | |||
| ) | [virtual] |
Performing the bounding operation.
Reimplemented from BcpsTreeNode.
| virtual int BlisTreeNode::bound | ( | BcpsModel * | model | ) | [virtual] |
Bounding procedure.
Implements BcpsTreeNode.
| virtual std::vector< CoinTriple<AlpsNodeDesc*, AlpsNodeStatus, double> > BlisTreeNode::branch | ( | ) | [virtual] |
Takes the explicit description of the current active node and creates the children's descriptions, which contain information about how the branching is to be done.
The stati of the children are AlpsNodeStatusCandidate.
Implements BcpsTreeNode.
| int BlisTreeNode::selectBranchObject | ( | BlisModel * | model, | |
| bool & | foundSol, | |||
| int | numPassesLeft | |||
| ) |
Select a branching object based on give branching strategy.
| virtual int BlisTreeNode::chooseBranchingObject | ( | BcpsModel * | ) | [inline, virtual] |
| int BlisTreeNode::generateConstraints | ( | BlisModel * | model, | |
| BcpsConstraintPool & | conPool | |||
| ) |
Generate constraints.
| int BlisTreeNode::callHeuristics | ( | BlisModel * | model, | |
| bool | onlyBeforeRoot = false | |||
| ) |
Call heuristic to search solutions.
0: no solution; 1: found solutions; 2: fathom this node. onlyBeforeRoot is for heuristics like feasibility pump.
| void BlisTreeNode::getViolatedConstraints | ( | BlisModel * | model, | |
| const double * | currLpSolution, | |||
| BcpsConstraintPool & | conPool | |||
| ) |
Get violated constraints.
| BlisReturnStatus BlisTreeNode::applyConstraints | ( | BlisModel * | model, | |
| const double * | solution, | |||
| BcpsConstraintPool & | conPool | |||
| ) |
Select and apply constraints.
| BlisReturnStatus BlisTreeNode::reducedCostFix | ( | BlisModel * | model | ) |
Fix and tighten varaibles based optimality conditions.
| virtual AlpsEncoded* BlisTreeNode::encode | ( | ) | const [virtual] |
Encode this node for message passing.
Reimplemented from AlpsKnowledge.
| virtual AlpsKnowledge* BlisTreeNode::decode | ( | AlpsEncoded & | ) | const [virtual] |
Decode a node from an encoded object.
Reimplemented from AlpsKnowledge.
The documentation for this class was generated from the following files:
- /home/coin/svn-release/OptimizationSuite-1.1.0/Bcps/examples/Blis/BlisSubTree.h
- /home/coin/svn-release/OptimizationSuite-1.1.0/Bcps/examples/Blis/BlisTreeNode.h
- /home/coin/svn-release/OptimizationSuite-1.1.0/Blis/src/BlisSubTree.h
- /home/coin/svn-release/OptimizationSuite-1.1.0/Blis/src/BlisTreeNode.h
