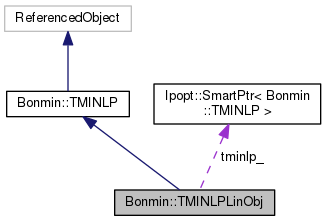
From a TMINLP, this class adapts to another TMINLP where the original objective is transformed into a constraint by adding an extra variable which is minimized. More...
#include <BonTMINLPLinObj.hpp>
Public Member Functions | |
| TMINLPLinObj () | |
| Default constructor. More... | |
| virtual | ~TMINLPLinObj () |
| destructor. More... | |
| void | setTminlp (Ipopt::SmartPtr< TMINLP > tminlp) |
| set reference TMINLP More... | |
| virtual bool | get_variables_linearity (Ipopt::Index n, Ipopt::TNLP::LinearityType *c) |
| overload this method to provide the variables linearity. More... | |
| virtual const BranchingInfo * | branchingInfo () const |
| Use tminlp_ function. More... | |
| virtual const SosInfo * | sosConstraints () const |
| Use tminlp_ function. More... | |
| virtual const PerturbInfo * | perturbInfo () const |
| Use tminlp_ function. More... | |
| virtual bool | hasUpperBoundingObjective () |
| Use tminlp_ function. More... | |
| virtual bool | eval_upper_bound_f (Ipopt::Index n, const Ipopt::Number *x, Ipopt::Number &obj_value) |
| Use tminlp_ function. More... | |
| virtual bool | hasLinearObjective () |
| Say if problem has a linear objective (for OA) More... | |
| Ipopt::SmartPtr< TMINLP > | tminlp () |
| return pointer to tminlp_. More... | |
methods to gather information about the MINLP | |
| virtual bool | get_nlp_info (Ipopt::Index &n, Ipopt::Index &m, Ipopt::Index &nnz_jac_g, Ipopt::Index &nnz_h_lag, Ipopt::TNLP::IndexStyleEnum &index_style) |
| Return the number of variables and constraints, and the number of non-zeros in the jacobian and the hessian. More... | |
| virtual bool | get_scaling_parameters (Ipopt::Number &obj_scaling, bool &use_x_scaling, Ipopt::Index n, Ipopt::Number *x_scaling, bool &use_g_scaling, Ipopt::Index m, Ipopt::Number *g_scaling) |
| Return scaling parameters. More... | |
| virtual bool | get_variables_types (Ipopt::Index n, VariableType *var_types) |
| Get the variable type. More... | |
| virtual bool | get_constraints_linearity (Ipopt::Index m, Ipopt::TNLP::LinearityType *const_types) |
| Return the constraints linearity. More... | |
| virtual bool | get_bounds_info (Ipopt::Index n, Ipopt::Number *x_l, Ipopt::Number *x_u, Ipopt::Index m, Ipopt::Number *g_l, Ipopt::Number *g_u) |
| Return the information about the bound on the variables and constraints. More... | |
| virtual bool | get_starting_point (Ipopt::Index n, bool init_x, Ipopt::Number *x, bool init_z, Ipopt::Number *z_L, Ipopt::Number *z_U, Ipopt::Index m, bool init_lambda, Ipopt::Number *lambda) |
| Return the starting point. More... | |
| virtual bool | eval_f (Ipopt::Index n, const Ipopt::Number *x, bool new_x, Ipopt::Number &obj_value) |
| Return the value of the objective function. More... | |
| virtual bool | eval_grad_f (Ipopt::Index n, const Ipopt::Number *x, bool new_x, Ipopt::Number *grad_f) |
| Return the vector of the gradient of the objective w.r.t. More... | |
| virtual bool | eval_g (Ipopt::Index n, const Ipopt::Number *x, bool new_x, Ipopt::Index m, Ipopt::Number *g) |
| Return the vector of constraint values. More... | |
| virtual bool | eval_jac_g (Ipopt::Index n, const Ipopt::Number *x, bool new_x, Ipopt::Index m, Ipopt::Index nele_jac, Ipopt::Index *iRow, Ipopt::Index *jCol, Ipopt::Number *values) |
| Return the jacobian of the constraints. More... | |
| virtual bool | eval_h (Ipopt::Index n, const Ipopt::Number *x, bool new_x, Ipopt::Number obj_factor, Ipopt::Index m, const Ipopt::Number *lambda, bool new_lambda, Ipopt::Index nele_hess, Ipopt::Index *iRow, Ipopt::Index *jCol, Ipopt::Number *values) |
| Return the hessian of the lagrangian. More... | |
| virtual bool | eval_gi (Ipopt::Index n, const Ipopt::Number *x, bool new_x, Ipopt::Index i, Ipopt::Number &gi) |
| Compute the value of a single constraint. More... | |
| virtual bool | eval_grad_gi (Ipopt::Index n, const Ipopt::Number *x, bool new_x, Ipopt::Index i, Ipopt::Index &nele_grad_gi, Ipopt::Index *jCol, Ipopt::Number *values) |
| Compute the structure or values of the gradient for one constraint. More... | |
Solution Methods | |
| virtual void | finalize_solution (TMINLP::SolverReturn status, Ipopt::Index n, const Ipopt::Number *x, Ipopt::Number obj_value) |
| Use tminlp_ function. More... | |
 Public Member Functions inherited from Bonmin::TMINLP Public Member Functions inherited from Bonmin::TMINLP | |
| virtual bool | get_constraint_convexities (int m, TMINLP::Convexity *constraints_convexities) const |
| Get accest to constraint convexities. More... | |
| virtual bool | get_number_nonconvex (int &number_non_conv, int &number_concave) const |
| Get dimension information on nonconvex constraints. More... | |
| virtual bool | get_constraint_convexities (int number_non_conv, MarkedNonConvex *non_convs) const |
| Get array describing the constraints marked nonconvex in the model. More... | |
| virtual bool | get_simple_concave_constraints (int number_concave, SimpleConcaveConstraint *simple_concave) const |
| Fill array containing indices of simple concave constraints. More... | |
| bool | hasGeneralInteger () |
| Say if problem has general integer variables. More... | |
| virtual const int * | get_const_xtra_id () const |
| Access array describing constraint to which perspectives should be applied. More... | |
| TMINLP () | |
| Default destructor. More... | |
| virtual | ~TMINLP () |
| Default destructor. More... | |
Private Member Functions | |
| void | gutsOfDestructor () |
| Reset all data. More... | |
Private Attributes | |
| Ipopt::SmartPtr< TMINLP > | tminlp_ |
| Reference TMINLP which is to be relaxed. More... | |
| int | m_ |
| Ipopt::Number of constraints in the transformed MINLP. More... | |
| int | n_ |
| Ipopt::Number of variables in the transformed MINLP. More... | |
| int | nnz_jac_ |
| number of non-zeroes in the jacobian of the transformed MINLP. More... | |
| int | offset_ |
| offset for jacobian. More... | |
Additional Inherited Members | |
| Public Types inherited from Bonmin::TMINLP | |
| enum | SolverReturn { SUCCESS, INFEASIBLE, CONTINUOUS_UNBOUNDED, LIMIT_EXCEEDED, USER_INTERRUPT, MINLP_ERROR } |
| Return statuses of algorithm. More... | |
| enum | VariableType { CONTINUOUS, BINARY, INTEGER } |
| Type of the variables. More... | |
| enum | Convexity { Convex, NonConvex, SimpleConcave } |
| Used to mark constraints of the problem. More... | |
| Protected Member Functions inherited from Bonmin::TMINLP | |
| TMINLP (const TMINLP &) | |
| Copy constructor. More... | |
| void | operator= (const TMINLP &) |
| Overloaded Equals Operator. More... | |
Detailed Description
From a TMINLP, this class adapts to another TMINLP where the original objective is transformed into a constraint by adding an extra variable which is minimized.
More precisely
![\[ \begin{array}{l} \min f(x)\\ s.t\\ g_l \leq g(x) \leq g_u\\ x_l \leq x \leq u \end{array} \]](form_2.png)
is transformed ino {array}{l} \ s.t\ - f(x) - 0\ g_l g(x) g_u\ x_l x u {array} ] The objective is put as first constraint of the problem and the extra variable is the last one.
Definition at line 39 of file BonTMINLPLinObj.hpp.
Constructor & Destructor Documentation
| Bonmin::TMINLPLinObj::TMINLPLinObj | ( | ) |
Default constructor.
Definition at line 15 of file BonTMINLPLinObj.cpp.
|
virtual |
destructor.
Definition at line 26 of file BonTMINLPLinObj.cpp.
Member Function Documentation
| void Bonmin::TMINLPLinObj::setTminlp | ( | Ipopt::SmartPtr< TMINLP > | tminlp | ) |
set reference TMINLP
Definition at line 31 of file BonTMINLPLinObj.cpp.
|
virtual |
Return the number of variables and constraints, and the number of non-zeros in the jacobian and the hessian.
Call tminlp_ one but number of constraints and non-zeroes in the jacobian is stored internally.
Implements Bonmin::TMINLP.
Definition at line 44 of file BonTMINLPLinObj.cpp.
|
virtual |
Return scaling parameters.
If tminlp_ method returns true, translate constraint scaling (if asked).
Reimplemented from Bonmin::TMINLP.
Definition at line 59 of file BonTMINLPLinObj.cpp.
|
inlinevirtual |
Get the variable type.
Just call tminlp_'s method;.
Implements Bonmin::TMINLP.
Definition at line 68 of file BonTMINLPLinObj.hpp.
|
virtual |
Return the constraints linearity.
Call tminlp_'s method and translate.
Implements Bonmin::TMINLP.
Definition at line 86 of file BonTMINLPLinObj.cpp.
|
virtual |
Return the information about the bound on the variables and constraints.
Call tminlp_'s method and translate constraints bounds.
Implements Bonmin::TMINLP.
Definition at line 94 of file BonTMINLPLinObj.cpp.
|
virtual |
Return the starting point.
Have to translate z_L and z_U.
Implements Bonmin::TMINLP.
Definition at line 110 of file BonTMINLPLinObj.cpp.
|
inlinevirtual |
Return the value of the objective function.
Just call tminlp_ method.
Implements Bonmin::TMINLP.
Definition at line 96 of file BonTMINLPLinObj.hpp.
|
inlinevirtual |
Return the vector of the gradient of the objective w.r.t.
x. Just call tminlp_ method.
Implements Bonmin::TMINLP.
Definition at line 104 of file BonTMINLPLinObj.hpp.
|
virtual |
Return the vector of constraint values.
Use tminlp_ functions and use mapping to get the needed values.
Implements Bonmin::TMINLP.
Definition at line 127 of file BonTMINLPLinObj.cpp.
|
virtual |
Return the jacobian of the constraints.
In first call nothing to change. In later just fix the values for the simple concaves and remove entries corresponding to nonConvex constraints.
Implements Bonmin::TMINLP.
Definition at line 139 of file BonTMINLPLinObj.cpp.
|
virtual |
Return the hessian of the lagrangian.
Here we just put lambda in the correct format and call tminlp_'s function.
Implements Bonmin::TMINLP.
Definition at line 165 of file BonTMINLPLinObj.cpp.
|
virtual |
Compute the value of a single constraint.
The constraint number is i (starting counting from 0.
Reimplemented from Bonmin::TMINLP.
Definition at line 178 of file BonTMINLPLinObj.cpp.
|
virtual |
Compute the structure or values of the gradient for one constraint.
The constraint * number is i (starting counting from 0. Other things are like with eval_jac_g.
Reimplemented from Bonmin::TMINLP.
Definition at line 192 of file BonTMINLPLinObj.cpp.
|
inlinevirtual |
overload this method to provide the variables linearity.
array should be allocated with length at least n.
Implements Bonmin::TMINLP.
Definition at line 145 of file BonTMINLPLinObj.hpp.
|
inlinevirtual |
Use tminlp_ function.
Implements Bonmin::TMINLP.
Definition at line 157 of file BonTMINLPLinObj.hpp.
|
inlinevirtual |
Use tminlp_ function.
Implements Bonmin::TMINLP.
Definition at line 165 of file BonTMINLPLinObj.hpp.
|
inlinevirtual |
Use tminlp_ function.
- Bug:
- Has to translate sos information.
Implements Bonmin::TMINLP.
Definition at line 171 of file BonTMINLPLinObj.hpp.
|
inlinevirtual |
Use tminlp_ function.
Reimplemented from Bonmin::TMINLP.
Definition at line 175 of file BonTMINLPLinObj.hpp.
|
inlinevirtual |
Use tminlp_ function.
Reimplemented from Bonmin::TMINLP.
Definition at line 181 of file BonTMINLPLinObj.hpp.
|
inlinevirtual |
Use tminlp_ function.
Reimplemented from Bonmin::TMINLP.
Definition at line 186 of file BonTMINLPLinObj.hpp.
|
inlinevirtual |
Say if problem has a linear objective (for OA)
Reimplemented from Bonmin::TMINLP.
Definition at line 192 of file BonTMINLPLinObj.hpp.
|
inline |
return pointer to tminlp_.
Definition at line 194 of file BonTMINLPLinObj.hpp.
|
private |
Reset all data.
Definition at line 21 of file BonTMINLPLinObj.cpp.
Member Data Documentation
|
private |
Reference TMINLP which is to be relaxed.
Definition at line 200 of file BonTMINLPLinObj.hpp.
|
private |
Ipopt::Number of constraints in the transformed MINLP.
Definition at line 202 of file BonTMINLPLinObj.hpp.
|
private |
Ipopt::Number of variables in the transformed MINLP.
Definition at line 204 of file BonTMINLPLinObj.hpp.
|
private |
number of non-zeroes in the jacobian of the transformed MINLP.
Definition at line 206 of file BonTMINLPLinObj.hpp.
|
private |
offset for jacobian.
Definition at line 208 of file BonTMINLPLinObj.hpp.
The documentation for this class was generated from the following files:
- /tmp/OS-2.10.2/Bonmin/src/Algorithms/QuadCuts/BonTMINLPLinObj.hpp
- /tmp/OS-2.10.2/Bonmin/src/Algorithms/QuadCuts/BonTMINLPLinObj.cpp
