#include <CbcTree.hpp>
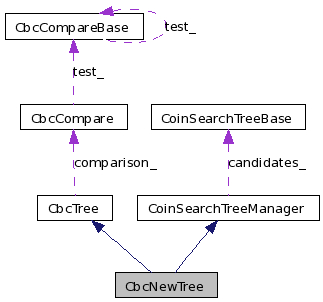
Inheritance diagram for CbcNewTree:
Public Member Functions | |
| CbcNewTree () | |
| CbcNewTree (const CbcNewTree &rhs) | |
| CbcNewTree & | operator= (const CbcNewTree &rhs) |
| virtual | ~CbcNewTree () |
| virtual CbcNewTree * | clone () const |
| Clone. | |
| virtual void | generateCpp (FILE *fp) |
| Create C++ lines to get to current state. | |
Heap access and maintenance methods | |
| void | setComparison (CbcCompareBase &compare) |
| Set comparison function and resort heap. | |
| virtual CbcNode * | top () const |
| Return the top node of the heap. | |
| virtual void | push (CbcNode *x) |
| Add a node to the heap. | |
| virtual void | pop () |
| Remove the top node from the heap. | |
| virtual CbcNode * | bestNode (double cutoff) |
| Gets best node and takes off heap. | |
vector methods | |
| virtual bool | empty () |
| Test if empty *** note may be overridden. | |
| int | size () const |
| Return size. | |
| CbcNode * | operator[] (int i) const |
| [] operator | |
| CbcNode * | nodePointer (int i) const |
| Return a node pointer. | |
Search tree maintenance | |
| void | cleanTree (CbcModel *model, double cutoff, double &bestPossibleObjective) |
| Prune the tree using an objective function cutoff. | |
| CbcNode * | bestAlternate () |
| Get best on list using alternate method. | |
| virtual void | endSearch () |
| We may have got an intelligent tree so give it one more chance. | |
Definition at line 112 of file CbcTree.hpp.
| CbcNewTree::CbcNewTree | ( | ) |
| CbcNewTree::CbcNewTree | ( | const CbcNewTree & | rhs | ) |
| virtual CbcNewTree::~CbcNewTree | ( | ) | [virtual] |
| CbcNewTree& CbcNewTree::operator= | ( | const CbcNewTree & | rhs | ) |
| virtual CbcNewTree* CbcNewTree::clone | ( | ) | const [virtual] |
| virtual void CbcNewTree::generateCpp | ( | FILE * | fp | ) | [inline, virtual] |
Create C++ lines to get to current state.
Reimplemented from CbcTree.
Definition at line 129 of file CbcTree.hpp.
| void CbcNewTree::setComparison | ( | CbcCompareBase & | compare | ) |
| virtual CbcNode* CbcNewTree::top | ( | ) | const [virtual] |
| virtual void CbcNewTree::push | ( | CbcNode * | x | ) | [virtual] |
| virtual void CbcNewTree::pop | ( | ) | [virtual] |
| virtual CbcNode* CbcNewTree::bestNode | ( | double | cutoff | ) | [virtual] |
| virtual bool CbcNewTree::empty | ( | ) | [virtual] |
| int CbcNewTree::size | ( | ) | const [inline, virtual] |
Return size.
Reimplemented from CbcTree.
Definition at line 156 of file CbcTree.hpp.
References CbcTree::nodes_.
| CbcNode* CbcNewTree::operator[] | ( | int | i | ) | const [inline] |
| CbcNode* CbcNewTree::nodePointer | ( | int | i | ) | const [inline] |
| void CbcNewTree::cleanTree | ( | CbcModel * | model, | |
| double | cutoff, | |||
| double & | bestPossibleObjective | |||
| ) | [virtual] |
Prune the tree using an objective function cutoff.
This routine removes all nodes with objective worst than the specified cutoff value. It also sets bestPossibleObjective to best of all on tree before deleting.
Reimplemented from CbcTree.
| CbcNode* CbcNewTree::bestAlternate | ( | ) |
| virtual void CbcNewTree::endSearch | ( | ) | [inline, virtual] |
We may have got an intelligent tree so give it one more chance.
Reimplemented from CbcTree.
Definition at line 186 of file CbcTree.hpp.
 1.4.7
1.4.7